21 KiB

基于编码结构光的高铁轮轨姿态三维重建
3D Reconstruction of high-speed rail-wheel based on coded structured light
The wheel-rail attitude of high-speed rail reflects the complex dynamic interaction and restraint relationship between wheels and rails. Mastering the true contact attitude between them is an important foundation for ensuring the safe of high-speed railways. How to accurately obtain the wheel-track attitude of high-speed railways has always been a hot research field in domestic railway scientific research. However, it is imprecise and unreliable to obtain the wheel-rail contact attitude from 2D image. Extracting the feature points of the wheel-rail surface and reconstructing a 3D model can obtain the wheel-rail contact attitude more realistically and accurately.
Due to the fast running speed of high-speed trains, the wheel-rail surface is relatively smooth and there are no obvious feature points, which brings great challenges to the 3D reconstruction based on feature point extraction.


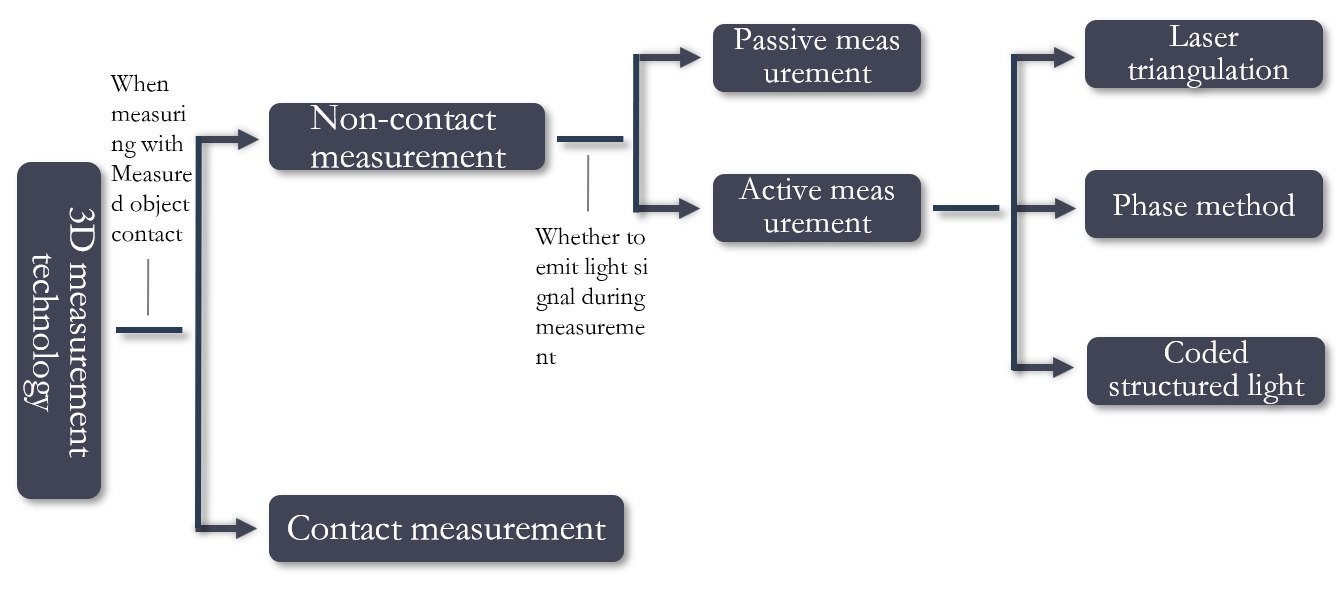
Although the contact measurement method has high measurement accuracy, the measurement efficiency is low, the speed is slow, and improper operation can easily damage the surface of the object to be measured, and because the probe has a certain surface area, it is difficult to measure objects with complex surfaces and does not have universality and versatility. Non-contact three-dimensional measurement methods can be divided into two categories: active measurement and passive measurement. The former is to project a designed pattern onto the surface of the target object. The pattern is distorted due to the height fluctuation of the object, and the target object is obtained by matching the distorted pattern. The latter is to illuminate the target object with ambient light and then detect the characteristic points of the target object to obtain its data. The non-contact measurement method has become the research trend of three-dimensional profile measurement due to its advantages of no damage, high measurement speed, and simplicity.
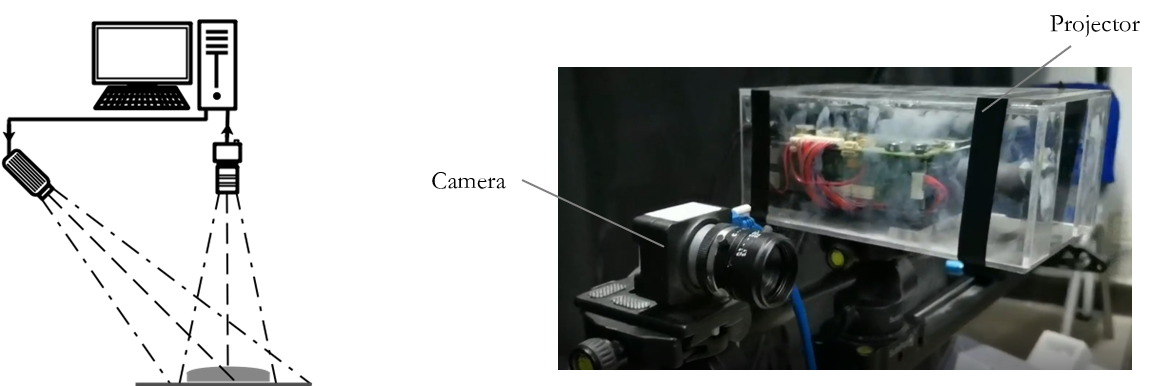
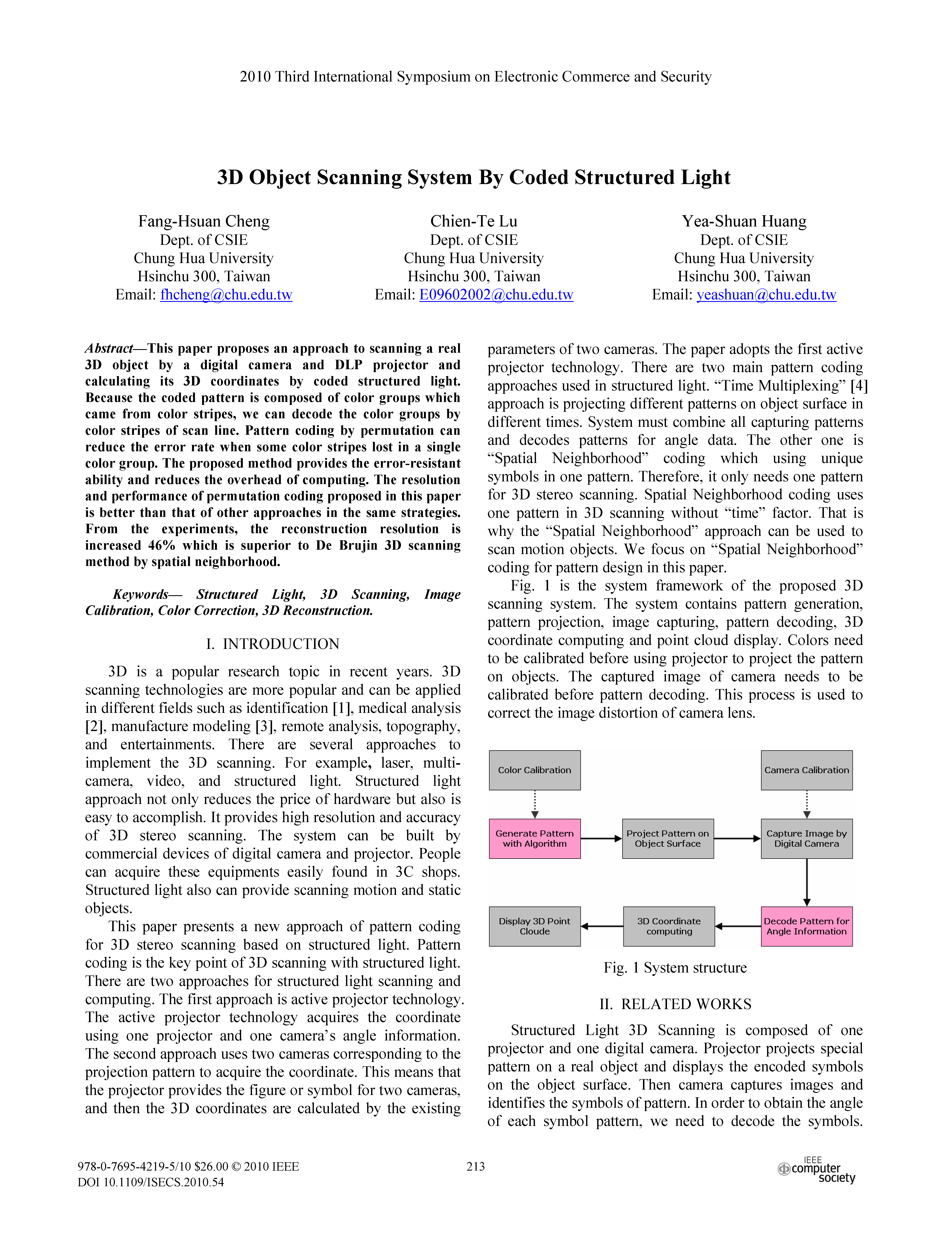
The coded structured light method used in the project uses a certain pattern of coded structured light patterns projected by the projector to encode the target object, uses the camera to obtain the object image, and uses the computer to decode the resulting image, using the image points in the camera and the projector The point correspondence in Calculates the space coordinates of the surface points of the object, obtains the three-dimensional information of the object, and restores the three-dimensional shape of the object. The structured light system is shown in the following figure.
The 3D reconstruction technology of coded structured light method is mainly composed of five key technologies: system calibration, structured light coding, image acquisition, structured light decoding and three-dimensional coordinate calculation.
- System Calibration: The system consists of a camera, a projector and a computer. The goal of calibration is to calculate the internal parameter matrix and the lens distortion coefficient of the camera and the projector and the external parameter matrix of the relative position between the two.
- Structured Light Coding: The "identity" of each point of the pattern can be identified through coding.
- Image Capture: The projector projects the coded structured light pattern on the surface of the target, and the pattern will be distorted with the modulation of the surface shape of the object. What is captured by the camera is the structured light image modulated by the object. The modulated image reflects the three-dimensional information of the surface shape of the object.
- Structured Light Decoding: Decode the captured structured light image, the decoding method depends on the encoding method. The purpose is to establish the correspondence between the feature points of the camera plane and the projection plane.
- 3D Coordinate Calculation: Using the corresponding relationship between the feature points and the calibration results, the 3D information of the feature points are obtained based on the principle of triangulation.
The coding methods of structured light mainly include Time-multiplexing and Space Codification. Although Time-multiplexing has good reconstruction accuracy, because multiple pictures need to be projected to the surface of the object, Time-multiplexing is not a good choice for moving objects. Although the reconstruction accuracy of Space Codification is relatively not as good as time coding, However, since only one picture needs to be projected, it is often used for object reconstruction of dynamic objects.
In summary, given the difficulty in the project that the surface of the wheel and rail is smooth and the feature points are not easy to extract, the feature points on the surface of the object can be artificially increased by projecting the coding pattern on the surface of the object. The spatial coding only needs a single projection, which is suitable for the reconstruction of dynamic objects. Therefore, this project mainly studies the method of spatial coding to obtain a relatively finer and high-density three-dimensional point cloud (point cloud, that is, a collection of feature points on the surface of the object. These points Contains information such as the three-dimensional coordinates and color of the surface of the object).
In the early stage of the project, I have an in-depth understanding of the research content of the project. According to the research content, I have looked up relevant literature and learned about the current status of various technical research. I can understand the principles of the classic method and be able to realize it. On the basis of studying and understanding the research content and related principles, I have studied related theories and related papers based on De Bruijn sequence coding and pseudorandom matrix coding in spatial coding. Some papers are shown below.

In the middle of the project, research, summarize, and organize the realization of the literature and classic algorithms read in the previous period. According to the research content of this project, it is planned to select applicable related algorithms and technologies, propose experimental ideas, and formulate experimental plans.
The pseudo-random sequence has good window characteristics, that is, when moving over the code pattern through a small window, the code combination in each window is unique, and the characteristic points on the code pattern can be uniquely identified according to this characteristic of the window. Reproduce the original polynomial of the paper using , The diamond shape is the basic element of the structured light coding pattern, and the four colors of red, blue, green and black are used as the different values represented by the marked diamond. The window size is
At the same time, using diamond-shaped corner points as feature points can effectively improve the accuracy of feature point extraction. According to the structured light decoding method proposed in the paper, the feature points on the surface of the object can be effectively extracted, but due to the small number of corner points, the effect of dense point cloud cannot be achieved. In the future, the camera resolution can be improved, the diamond area can be reduced, and feature points can be increased. Ways to increase the density of feature points. Some reference papers and experimental results are as follows.



The De Bruijn sequence is composed of n different elements, and any continuous subsequence of length m appears only once. The reproduced paper is coded with the B(3,4) sequence. Stripes are the basic elements of the structured light coding pattern. The three colors of red, blue and green are used as the different values of the marking stripes. The window size is , the center point of the stripe is used as the characteristic point. At the same time, in the HSV color space model, the V channel of the stripes is coded with a cosine function. In structured light decoding, in addition to extracting the fringe center point as a feature point, at the same time, windowed Fourier transform analysis is performed on the V channel of the captured image, and the density of feature points is increased by analyzing the phase obtained. According to the basic idea of the paper, the density of the point cloud can be increased while improving the progress of the point cloud extraction, and the experimental effect is better. According to the content of the project and the progress of related research, on the basis of research papers and experiments, the algorithm for reproducing papers is improved, and an algorithm flow suitable for the project scenario is proposed. Some papers are as follows.


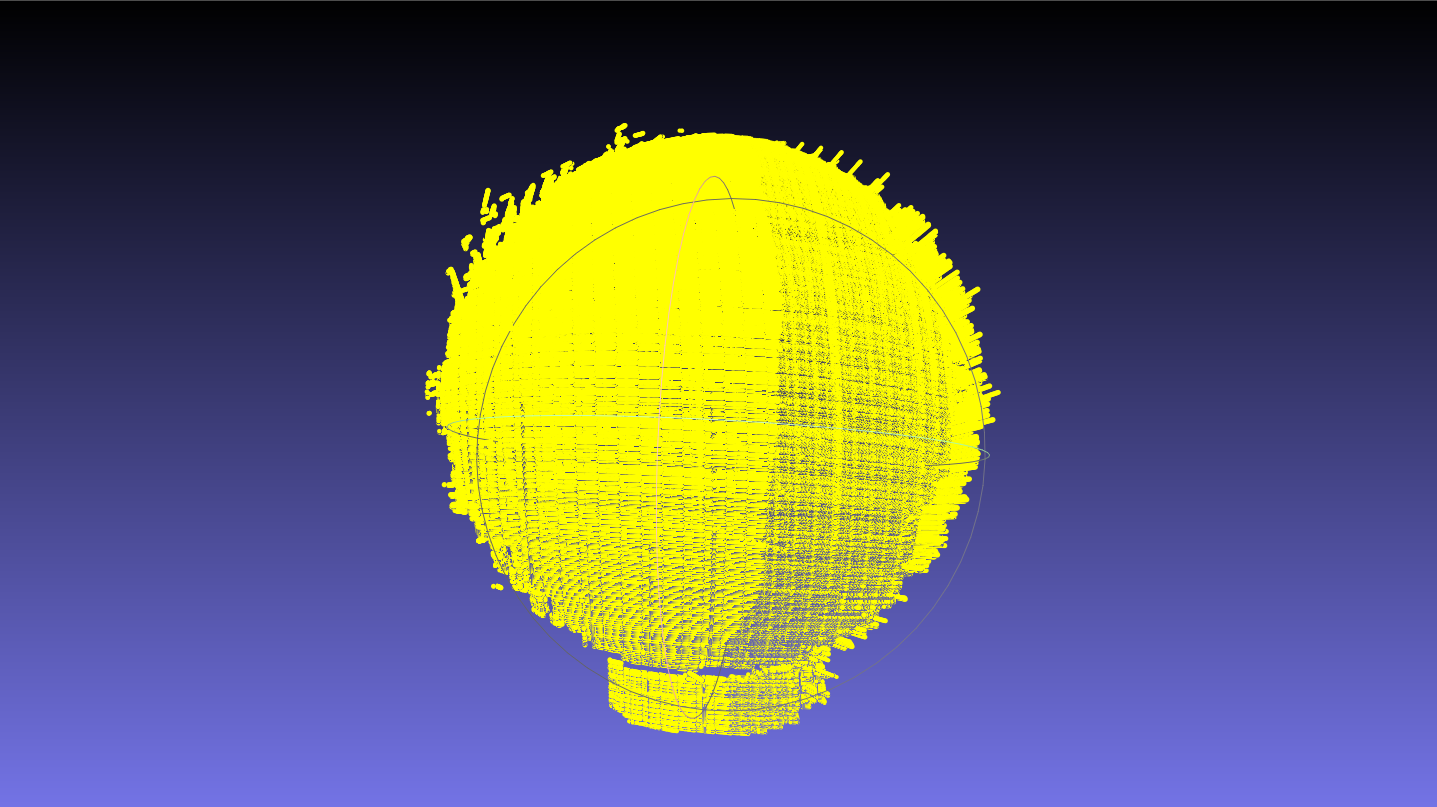
The surface of the sphere is reconstructed based on the improved algorithm, and about 17W point cloud data is obtained. The point cloud data is rendered in Meshlab. The experimental results are as follows.
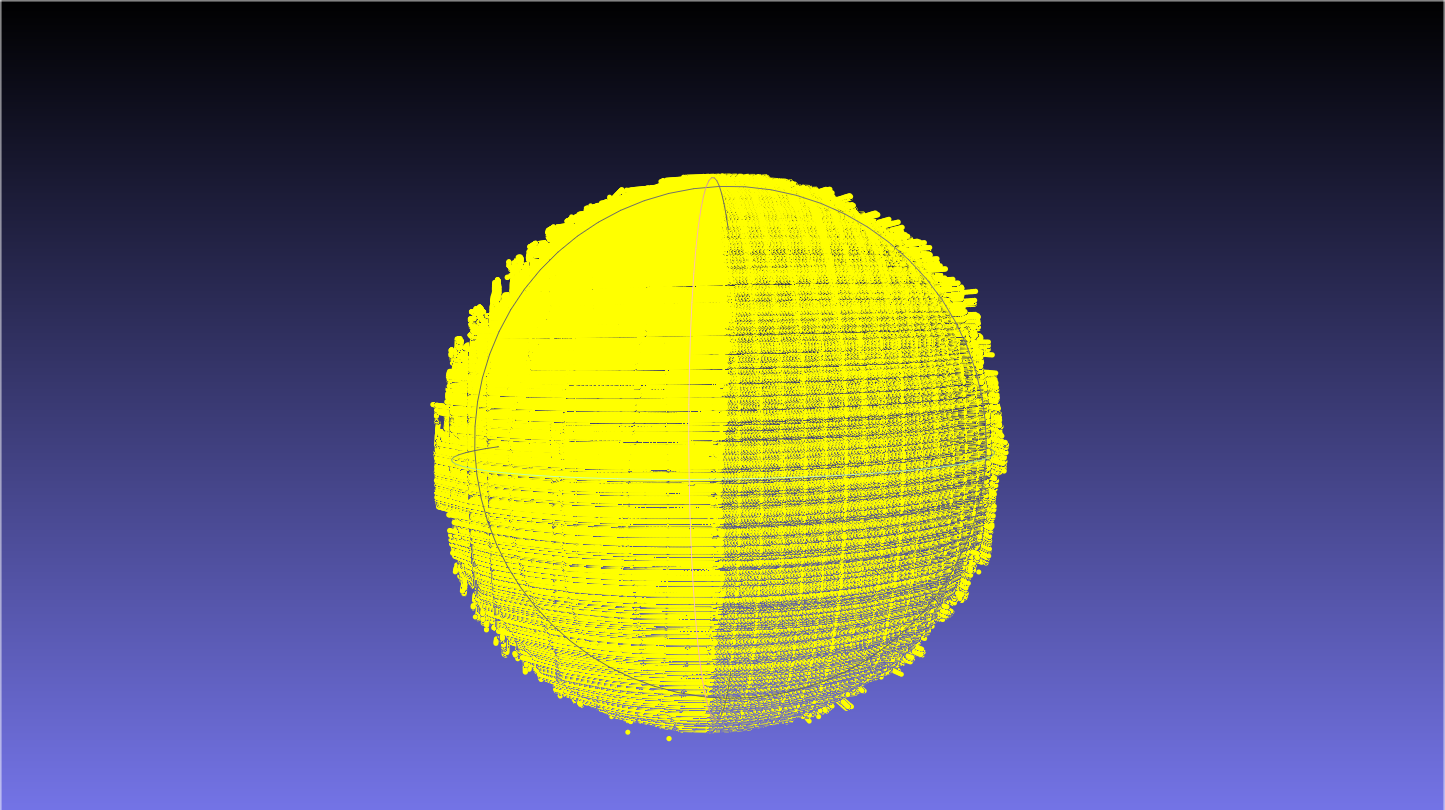
Use the B(4,3) sequence for coding. Stripes are the basic elements of structured light coding patterns. Four colors of red, blue, green and white are used as different values for the marking stripes. The window size is , using the center point of the stripe as the characteristic point. The surface of the sphere is also reconstructed to obtain about 20W point cloud data. The point cloud data is rendered in Meshlab. The experimental results are as follows.
The project was established in April 2019. Since the research, it has followed the research plan. It has studied, implemented, and optimized some existing 3D reconstruction methods based on spatially coded structured light, and proposed its own based on existing algorithms and project application scenarios. The solution and the software package has been completed, is expected to be used for 3D reconstruction of static and moving objects.
The main innovations of the project are as follows:
- Stripe center extraction with sub-pixel precision: Designed and implemented the coded structured light pattern and the stripe center point extraction algorithm suitable for the pattern, and the stripe center point is accurate to the sub-pixel level
- Increase point cloud density through wavelet transform: An improved method of windowed Fourier transform for fringe phase analysis is proposed. The wavelet transform based on generalized Morse wavelet is used for analysis to obtain the phase information of non-central points. Increase point cloud density
- Construction of a full-process 3D reconstruction platform: The above algorithm and point cloud visualization are packaged into structured light 3D reconstruction software, which completes the 3D reconstruction of rails and multiple geometric bodies, which is expected to be used for wheel-rail posture reconstruction and visualization
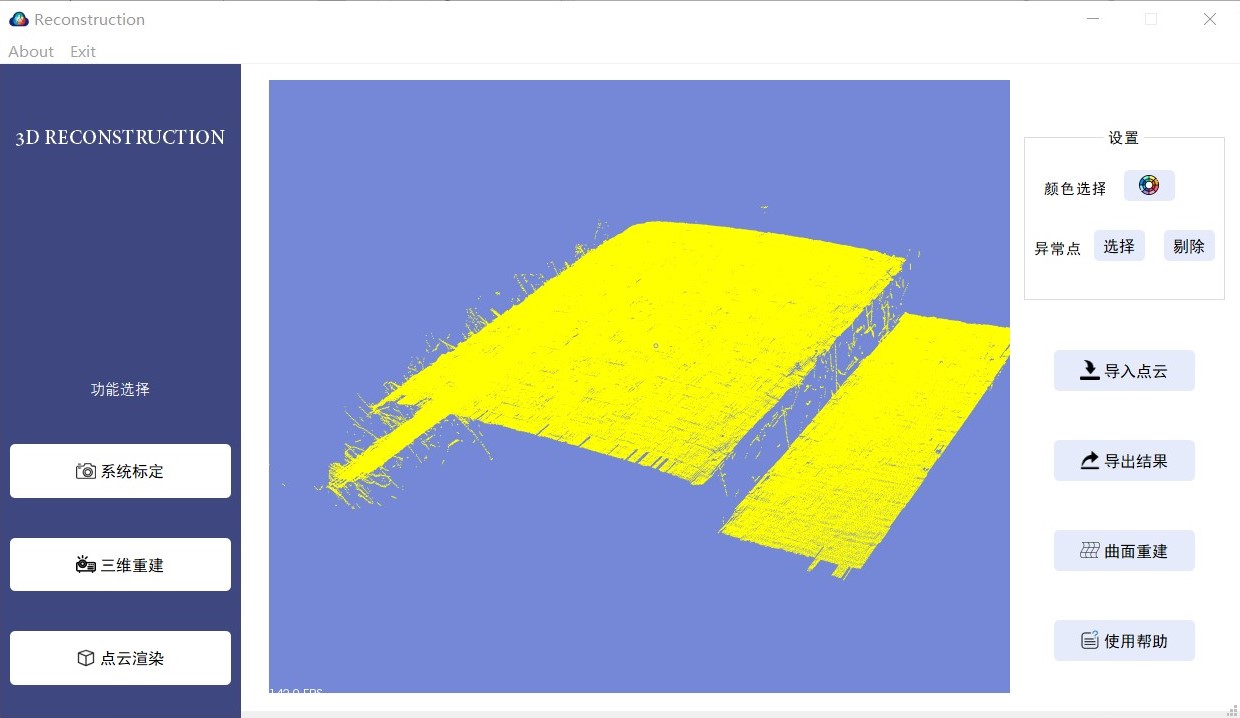
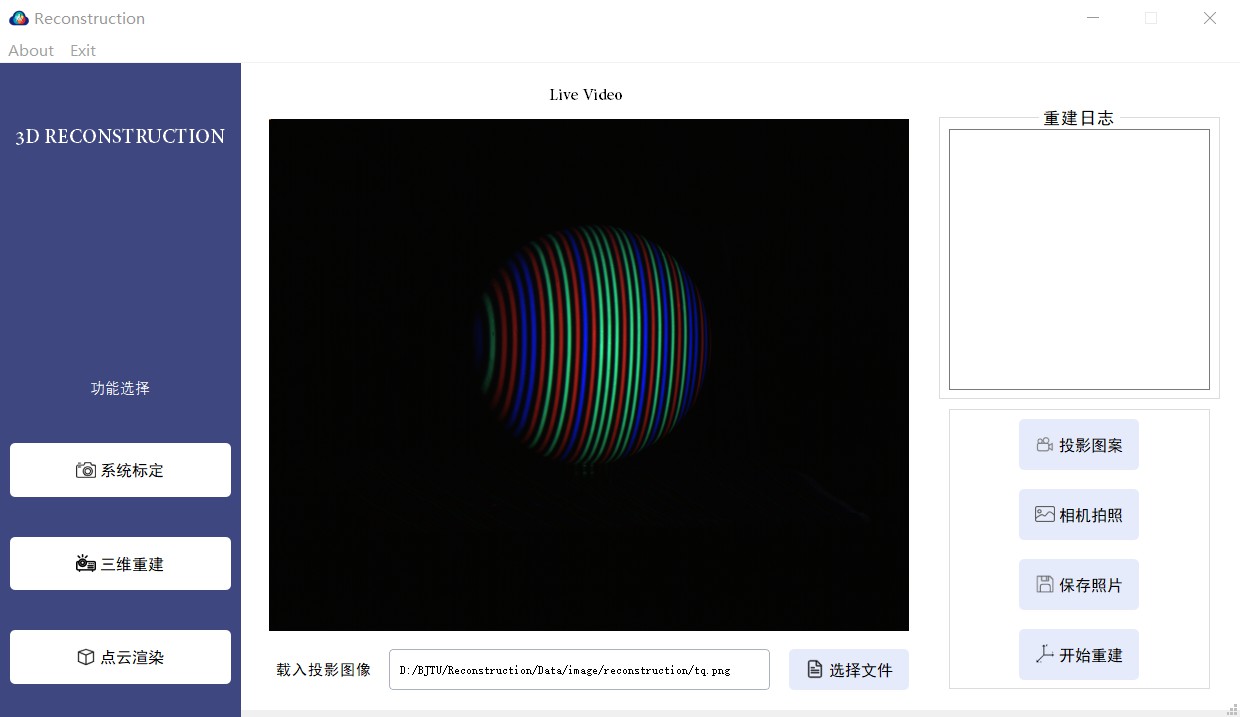
The software is shown as follows
- UI of System Calibration

- UI of 3D reconstruction
- UI of point cloud rendering