基于编码结构光的高铁轮轨姿态三维重建
3D Reconstruction of high-speed rail-wheel based on coded structured light




 | The main innovations of the project are as follows:
|
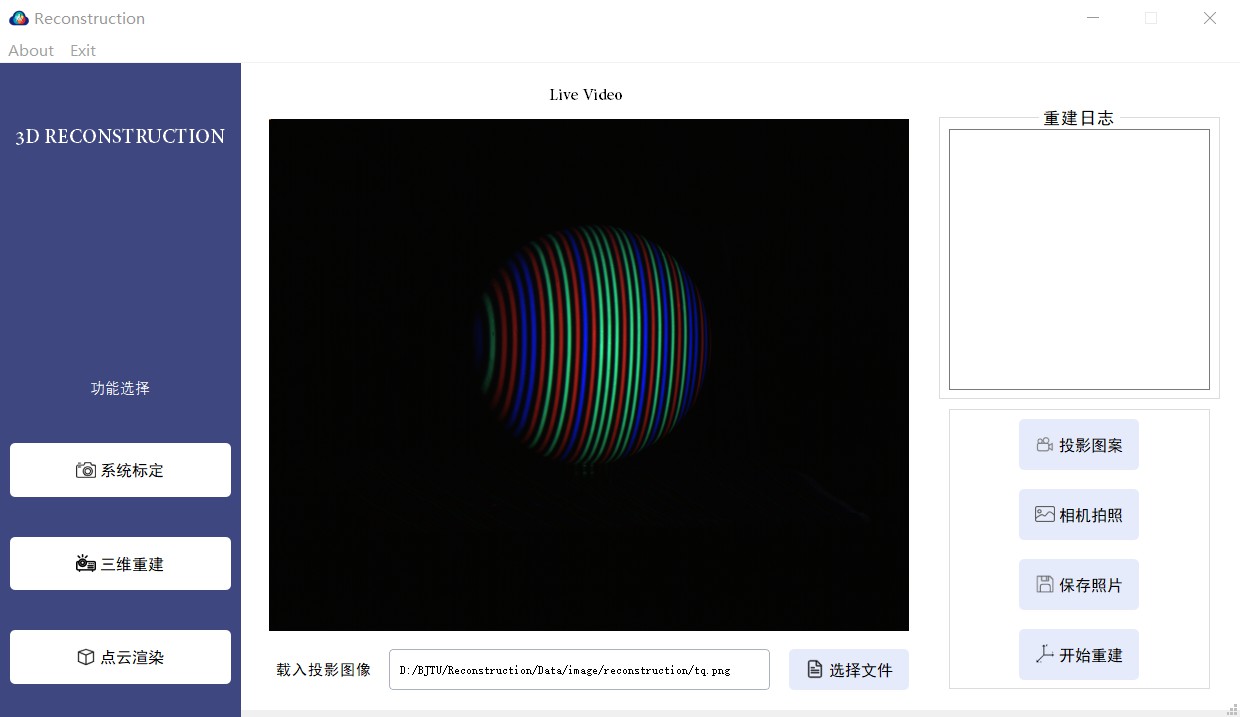
| Pattern Creation | The pattern is designed in HSV color space. And the pattern consists on a colored sinusoidal fringe pattern
There are 64 stripes in the coding pattern, and the stripe width is 14 𝑝𝑖𝑥𝑒𝑙, with the center point of the stripe as the feature point of the projection pattern ♣ The 𝐷𝑒 𝐵𝑟𝑢𝑖𝑗𝑛 sequence is composed of 𝑛 different elements, and any consecutive subsequence whose length is 𝑚 only appears once |  |
| DeBruijn Analysis | 在对灰度图像进行预处理后,为获得条纹中心点的位置,采用局部最大值算法从类似“高斯”形状的条纹灰度图像中提取图像每一行的局部最大值(以亚像素精度检测),局部最大值点即为条纹的中心点。在 𝐿𝑎𝑏 颜色空间下,对条纹中心点的颜色进行分类,在 4×1 的窗口中,即可获得条纹中心点在投影图案的对应位置。After preprocessing the gray image, in order to extract the center point of the stripes, a local maximum algorithm is applied to searching local maxima (detected with sub-pixel precision) of each row of the image from the strips which is present a gaussian-like shape, The local maximum point is the center point of the fringe. In the 𝐿𝑎𝑏 color space, classify the colors of the center point of the stripe. In a 4×1 window, you can get the corresponding position of the center point of the stripe in the projection pattern. |  |
| Wavelet Transform Analysis | The change of the V channel satisfies the given cosine function and contains the phase information of the non-center point of the fringe. But after the pattern is modulated by the object, the originally stable signal changes. As a non-stationary signal processing method, the wavelet transform method has been introduced into many signal processing fields, including phase extraction from fringe patterns. Comprehensive comparison of one-dimensional and two-dimensional window Fourier transform, wavelet transform and other methods, for the consideration of reconstruction accuracy and speed, the one-dimensional wavelet transform method is selected. The generalized Morse wavelet has flexible time-frequency local characteristics and strict analysis, and the effect of measuring the 3D contour of the object is better than the popular complex Morlet wavelet as the mother wavelet. |  |
 |
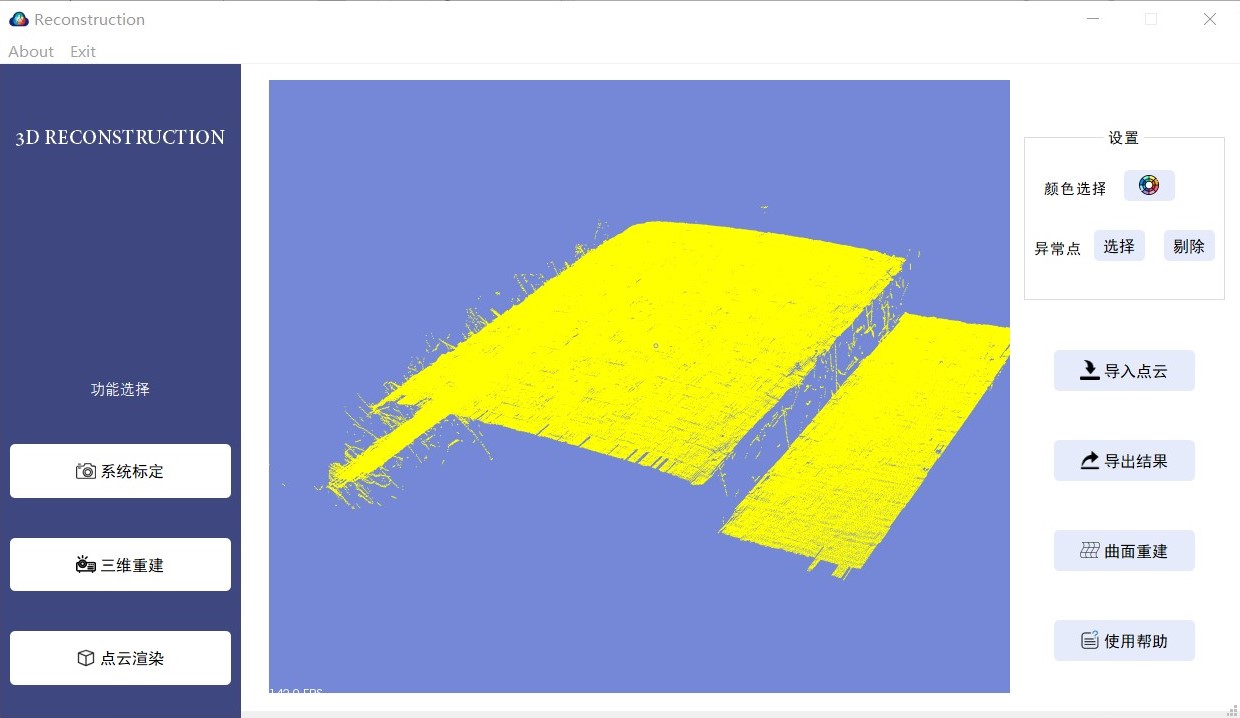
 |  |
| Sphere with a radius of 95mm Point cloud data 17W+ Radius error 0.678mm Calculation time 10-15s | Multi-object 3D reconstruction | 3D reconstruction of rail surface |

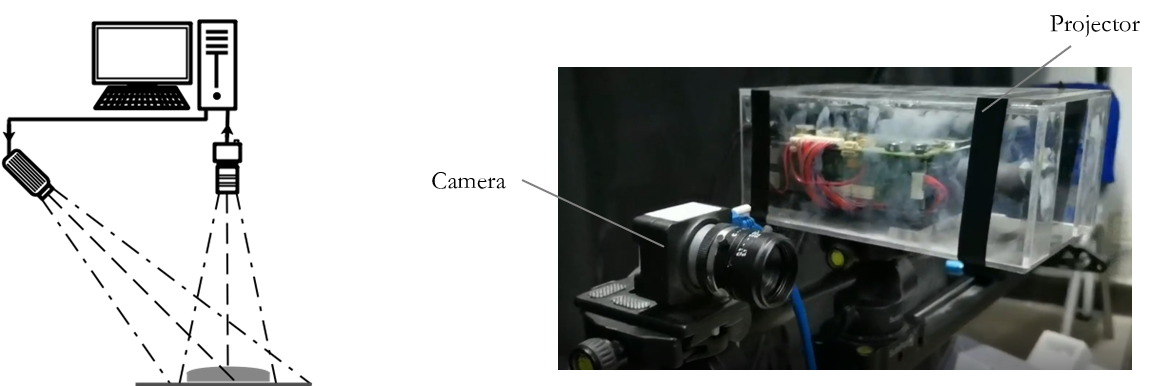
| Hardware | Version |
| Point Grey Camera | —— |
| LightCrafter4500 | —— |
| Software | Version |
| Windows | Windows 10 |
| Visual Studio | 2017 |
| QT | 5.12.3 |
| OpenCV | 4.2.03 |
| FlyCapture2 | 2.12.3.2 |
| PCL | 1.8.1 |
| VTK | 8.0 |